

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Aktualności
Start > Aktualności > Can Bus Interface absolutnego enkodera wału fotoelektrycznego
2024-04-15
Can Bus Interface absolutnego enkodera wału fotoelektrycznego
1 Wprowadzenie Absolutny koder kąta wału fotoelektrycznego jest cyfrowym urządzeniem pomiarowym, które mierzy pozycję kątową i prędkość kątową obrotowego wału w czasie rzeczywistym. Konwertuje informacje o kącie wału w kody cyfrowe w postaci stopni, minut i sekund, a połączenie magistrali może zrealizować pomiar w czasie rzeczywistym. Ma zalety o wysokiej niezawodności pracy, silnej zdolności przeciw interferencji, wysokiej precyzji, pamięci o zwolnieniu i tak dalej. Jest szeroko stosowany w systemach śledzenia i pozycjonowania pomiarów cyfrowych, takich jak sprzęt do strzelania, cyfrowy teodolit, radar i duży sprzęt wojskowy.
W tych praktycznych systemach kontroli aplikacji, ze względu na różne struktury danych czujników i detektory każdego podsystemu, bezwzględny enkoder wału fotoelektrycznego będzie używać różnych metod komunikacji danych wewnętrznych, w tym głównie RS232, RS485 / 488 portów szeregowych, portów równoległych itp. . Jednak w określonych aplikacjach inżynieryjnych powyższe metody komunikacji są często ograniczone przez odległość transmisji i szybkość komunikacji. W ostatnich latach komunikacja seryjna szybko się rozwijała i pojawiły się różne formy autobusów terenowych systemu sterowania. Autobus puszki jest jednym z najczęściej używanych. Jest to skrót kontrolera lokalnego autobusu sieciowego i jest skutecznym wsparciem kontroli rozproszonej i kontroli w czasie rzeczywistym. Sieć komunikacji szeregowej. Ze względu na wysoką wydajność, wysoką niezawodność i unikalny projekt autobusu CAN, stał się najpopularniejszym i najpopularniejszym autobusem polowym w kraju i za granicą. Opracowanie i zmiany metod komunikacji wewnętrznej w systemie sterowania powodują, że enkoder używany do pomiaru przemieszczenia kątowego i prędkości kątowej zapewniają interfejs magistrali CAN w celu spełnienia wymagań projektowych całego systemu sterowania.
2 Zasada pracy i transmisja danych
2.1 Zasada pracy enkoder składa się z dwóch części: urządzenia do pozyskiwania danych i urządzenia przetwarzania danych. Schemat blokowy strukturalny pokazano w 1. Mikrokomputer z pojedynczym układem jest podstawową częścią układu obwodu enkodera. Po zebraniu sygnałów enkodera (gruby kod, średnio średni kod, kod drobny), jest on podzielony przez kod drobny, korekta kanału kodu, dodawanie cyfrowe, regulację zerową elektryczną, przetwarzanie oprogramowania, takie jak stopień, minuta i druga konwersja, a na koniec wyświetlanie i Uważaj na interfejs z systemem sterowania.
2.2 Transmisja danych Transmisja danych między enkoderem a systemem sterowania może być używana zarówno w trybach równoległych, jak i szeregowych. Równoległa transmisja przesyła dane przez port równoległy. Każde dane wymagają jednego rdzenia kabla danych. Na przykład 24-rdzeniowy kabel jest wymagany dla 24-bitowego enkodera. Dlatego przestrzeń do użycia jest ograniczona i nadaje się tylko do transmisji krótkich i specjalnych wymagań. okazja. W transmisji szeregowej informacje o danych są przesyłane seryjnie za pośrednictwem skręconej pary, a dodatkowe bity są dodawane zgodnie z różnymi protokołami komunikacji w celu wdrożenia funkcji, takich jak korekta błędów. Ta funkcja można rozszerzyć na systemy magistrali danych. Serial Transmission ma mniej przewodów, mniej sprzętu, niski koszt, długiej odległości transmisji oraz bezpieczne i niezawodne dane.

2.3 Proponowany interfejs kodera Encodera W kompleksowym porównaniu różnych autobusów polowych system komunikacyjny oparty na magistrali CAN ma wiele doskonałych cech: sygnał danych jest przesyłany przez napięcie różnicowe; Medium transmisyjne magistrali może używać skręconej pary, kabla koncentrycznego i światłowodu; może działać w trybie multi-master, elastyczny tryb komunikacji; może przesyłać i odbierać dane w trybie punkt-punkt, punkt-MultiPoint i globalny transmisja; Informacje o węzłach w sieci można podzielić na różne priorytety, aby spełnić różne wymagania w czasie rzeczywistym; technologia arbitrażowania autobusów nieniszcząca; Dane przyjmują krótką strukturę ramki, każda ramka to 8Byte, a poziom błędu danych jest niski; Podnajmu MAC warstwy łącza danych w protokole komunikacji ma ścisłe możliwości wykrywania błędów; Ma międzynarodowe standardy i dobrą otwartość. Dlatego w transformacji trybu komunikacji wewnętrznej systemu śledzenia fotoelektrycznego magistrala CAN jest używana jako struktura magistrali komunikacyjnej, a następnie proponuje się interfejs magistrali enkodera.
3 Zastosowanie interfejsu Bus Encoder Can w systemie śledzenia fotoelektrycznego
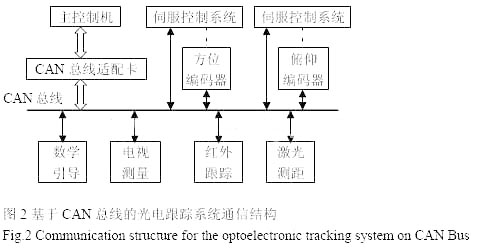
3.1 Koder służy do wykrywania pozycji systemu śledzenia fotoelektrycznego. Absolutny enkoder osi fotoelektrycznej jest czujnikiem pomiaru azymutu i kąta skoku systemu śledzenia fotoelektrycznego w systemie śledzenia fotoelektrycznego. Wewnętrzna struktura magistrali systemu śledzenia fotoelektrycznego jest przekształcana w metodę komunikacji magistrali CAN. Interfejs magistrali CAN ma charakterystykę elastycznego interfejsu i oszczędności linii. Jednocześnie ma mikroprocesor i może być używany jako inteligentny węzeł w systemie do wysyłania zdalnych ram bezpośrednio do innych urządzeń w celu uzyskania inteligentnej kontroli. Rysunek 2 to schemat struktury komunikacji systemu śledzenia fotoelektrycznego opartego na magistrali CAN. System śledzenia fotoelektrycznego wykorzystuje pojedynczą szeregową strukturę magistrali CAN zamiast równoległej struktury wielu metod komunikacji. Kąty azymutu i skoku mierzone przez dwa enkodery fotoelektryczne są wysyłane do głównej maszyny sterującej za pośrednictwem magistrali, a główna maszyna sterująca odpowiednio przetwarza dane. Za pośrednictwem systemu sterowania serwomechanizmem magistrali, wszystkie podsystemy można połączyć razem przez parę skręconych par, co upraszcza okablowanie systemowe, poprawia ogólne wykorzystanie magistrali systemowej, transmisję danych w czasie rzeczywistym i skalowalność systemu oraz błąd bitu Stawka jest znacznie zmniejszona.
3.2 Węzeł koder
Interfejs magistrali CAN składa się głównie z mikrokomputera pojedynczego układu, kontrolera magistrali CAN, CAN MUTUS i sprzętu izolacyjnego fotoelektrycznego. Specyficzny obwód interfejsu komunikacji magistrali CAN pokazano na rysunku 3.
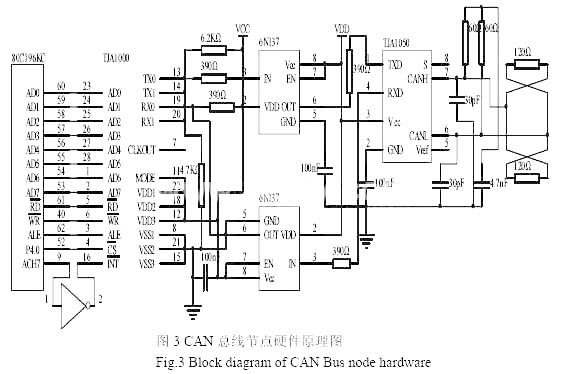
Komputer jednopierusowy wybiera Intel80C196KC, który jest 16-bitowym wbudowanym mikrokontrolerem, który jest bardziej odpowiedni dla złożonych okazji kontroli w czasie rzeczywistym. Odpowiada również za przetwarzanie danych enkodera i inicjalizację węzła magistrali CAN. Kontroler CAN wybiera SJA1000 Philips Semiconductor, aby zrealizować interfejs komunikacji danych między magistralą a komputerem hosta (komputer sterujący), obsługuje protokoły CAN2 -Out (FIFO) Zasada, obsługuje 11-bitowe i 29-bitowe kody identyfikacyjne, transmisja komunikacyjna do 1 Mb / s, może działać w trybie podstawowym i trybie pelikanu. Kierowca autobusu CAN wybiera Philips TJA1050, który jest szybkim sterownikiem magistrali puszu, który zapewnia interfejs między kontrolerem puszki a autobusem fizycznym, realizuje funkcje różnicowej transmisji i odbioru magistrali CAN, a ma szeroki zakres trybu wspólnego Przy silnej zdolności różnicowej interferencji elektromagnetycznej, poziom wejściowy jest kompatybilny z urządzeniami 3,3 V, a nieopustowane węzły nie będą zakłócać magistrali. Dołączenie do TJA1050 może zapewnić szybką komunikację danych. W przypadku bezpieczeństwa i ulepszonych zdolności anty-szamiennych zastosowanie dobrych charakterystyk symetrycznych wydajności TJA1050 używa osobnych terminali. Dwa małe kondensatory 30pf są połączone równolegle między CANH i CANL i uziemienie, które mogą odfiltrować zakłócenia wysokiej częstotliwości w magistrali i pewną zdolność do zapobiegania promieniowaniu elektromagnetycznym. W celu dalszego poprawy zdolności przeciw interferencji systemu, między optocupler 6N137 jest stosowany między sterownikiem CAN SJA1000 a sterownikiem CAN TJA1050 w celu utworzenia obwodu izolacyjnego w celu uzyskania izolacji galwanicznej. Zasilanie VCC i VDD po obu stronach 6N137 są całkowicie izolowane, co może zapobiec obwodowi w tym samym czasie, dwa rezystory dopasowania impedancji magistrali 120 Ω powinny być podłączone na obu końcach magistrali.
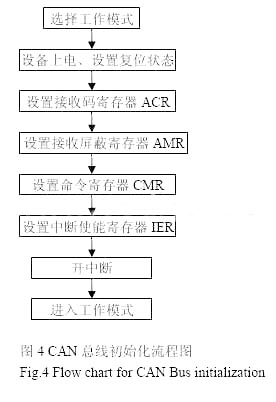
3.3 Oprogramowanie węzłowe Projektuj informacje o kącie (stopnie, minuty i sekundy) absolutnego enkodera osi fotoelektrycznej jest wysyłany z kontrolera CAN do magistrali CAN lub z magistrali CAN do bufora odbierania automatycznie przez kontroler magistrali SJA1000. Program komunikacyjny interfejsu Busu CAN składa się z podprogramu inicjalizacji, wysyłania podprogramu i otrzymania podprogramu. Najpierw wybierz tryb pracy magistrali CAN według rzeczywistych potrzeb systemu. Tutaj, wybierz tryb pelikana, Oscylator kryształowy 12 MHz, szybkość transmisji danych magistrali jest ustawiona na 500 kBs / s, każdy węzeł magistrali powinien ustawić tę samą szybkość transmisji danych, aby zapewnić normalną komunikację. Określ, że fizyczne połączenie między SJA1000 a MCU jest wiarygodne, a następnie zainicjuj kontroler SJA1000. W trybie resetowania SJA1000 ustaw stan początkowy każdego rejestru. Smokę przepływu inicjalizacji pokazano na rysunku 4. Transmisja i odbiór danych jest realizowany przez podprogram wysyłania i podprogram odbiorczy. Identyfikator wiadomości określa przepływ danych węzła. Podczas wysyłania danych zasada ustawiania segmentu flagi flagi odbioru wiadomości jest: odpowiedni identyfikator węzła, który musi zostać odebrany, bit to 0, a pozostałe bity to 1. Po otrzymaniu danych jest odwrotnie. Jest to oceniane na podstawie identyfikatora, czy są to informacje wysyłane do siebie. Jest odbierany, a nie filtrowany.
4. Wniosek
Jako autobus komunikacyjny na poziomie terenowym ma wysoką niezawodność i wydajność kosztów. Absolutny enkoder wału fotoelektrycznego z interfejsem Busu CAN sprawia, że jest bardziej elastyczny do użytku w systemach sterowania.
Ten artykuł jest innowacyjny: interfejs magistrali CAN enkodera i jego zastosowanie w systemie śledzenia fotoelektrycznego
Podziel się:
Wyślij zapytanie

Ms. carol Dong
Tel:86-431-85543703
Fax:86-431---88634119
Mobile Phone:+8613894866263
Email:sales@encoders.com.cn
Adres:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Strona mobilna
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.